
作者
郝永强,北京大学空间物理与应用技术研究所副教授
陈鸿飞,北京大学空间物理与应用技术研究所教授
王 珏,北京大学空间物理与应用技术研究所博士,航天科技集团中国空间技术研究院通信卫星事业部高级工程师
本文搜集整理来自JAXA故障报告及网络的信息,加以陈鸿飞教授及王珏高级工程师的深入阐释,剖析 “瞳”的故障过程和原因。
欢迎转载,请注明“本文来自北京大学空间物理与应用技术研究所网站 http://www.space.pku.edu.cn”
2016年2月17日,日本宇宙航空研究开发机构(JAXA)17日在鹿儿岛县种子岛宇宙中心发射了H-2A火箭第30号机,搭载观测巨型黑洞和星系团的X射线天文卫星“瞳”升空。
“瞳”的主要观测设备是一台能以极高精度测定X射线光子能级的X射线热量计。这一设备曾被满怀希望的安装在2000年ASTRO-E卫星和2005年的“朱雀”(Suzaku)卫星上,可惜那两次计划都失败了。
这一次,科学家们早早为“瞳”安排好了观测任务,发射升空后第8天,“瞳”就将望远镜对准距离地球2.5亿光年的一个英仙座星系团,取得了第一批观测数据。之后“瞳”调整姿态,继续瞄准了一个又一个的新目标。看似一切都难不住“瞳”灵巧的身姿,直到——“她的膝盖中了一箭……”。
3月26日日本时间03:01,“瞳”接到指令,从金牛座蟹状星云转向马卡良205星系。旋转,旋转,加速,加速……解体!迷の陨落,一切发生在转瞬之间。
图1 “瞳”结构示意图(http://global.jaxa.jp/projects/sat/astro_h/instruments.html)
1. 完美的“瞳”
在“瞳”上有两个设备与姿态控制有关,一个是惯性参考单元(Inertial Reference Unit, IRU),另一个是星敏感器(Star Tracker, STT)。卫星的姿控系统(Attitude Control System, ACS)通过读取这两个设备的数据来获知卫星的姿态信息。当卫星姿态需要调整时,就通过星上的反作用轮(Reaction Wheel)和启动推力器来进行。
一篇1986年的文章描述了ASTRO-C卫星的姿态控制系统[Ninomiya et al., 1986]:IRU由一组陀螺仪组成,此外还有一对星敏感器及一个二维太阳敏感器;卫星姿态和IRU的误差由IRU与星敏感器和太阳敏感器的输出共同确定,这一过程要通过卡尔曼滤波来完成;计算出的自旋误差再用于补偿陀螺仪的漂移偏差。
“瞳”的设计应该与其前辈差不多,应该更有所改进。为方便起见下文就用陀螺仪来指代IRU。JAXA的事故报告中介绍的工作模式大致是这样的:当由于卫星机动导致姿态发生变化时,陀螺仪的漂移会异常增大,此时需要由星敏感器的数据来校正它;当校正完成后,陀螺仪拥有更高的优先级,如果星敏感器与陀螺仪的误差超过1度时,姿态控制系统会优先选择更稳定的陀螺仪数据。因为星敏感器虽然精度更高,但它有时会受星食(恒星光线被地球遮挡)影响,而陀螺仪不受外界影响,工作更稳定。这样的设计应是很好的使两种设备互补,并实现了双保险。
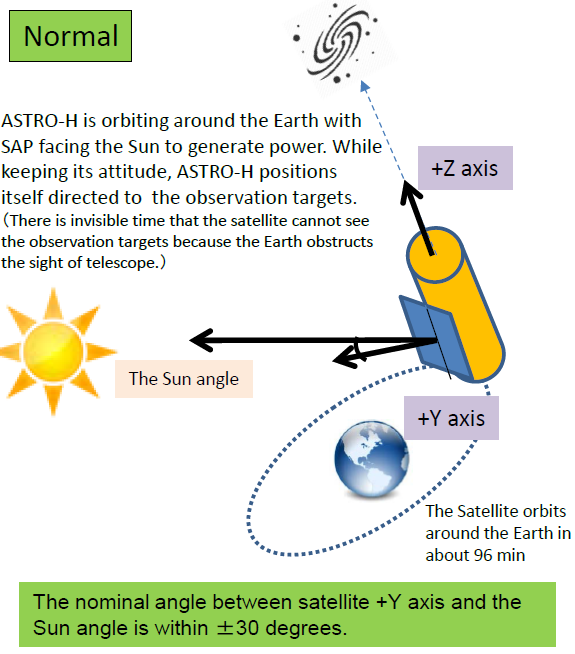
图2 “瞳”的姿态控制(摘自JAXA事故报告)
2. 毁灭之路
根据JAXA发布的事故报告,上述貌似完美的设计却轻易的被几个“巧合”击碎了:
在03:22左右,当“瞳”按照指令完成向马卡良205星系方向的旋转后,星敏感器正巧处于星食期间。星食过后,星敏感器首先需要进入捕获模式来完成初始化,然后才能进入跟踪模式,以提供准确信息去校正陀螺仪。
04:10星食结束了,星敏感器进入了跟踪模式。此时陀螺仪给出的卫星自旋速度很大,这可能是由于刚完成的机动导致陀螺仪的漂移误差,也可能是因星敏感器进入了跟踪模式触发了陀螺仪的初始化滤波。不过没关系,这些都在设计师的意料之中,星敏感器此时应该提供数据来校正陀螺仪,慢慢消除它的误差。
星敏感器
但是才过了1分钟,奇怪的事情之一发生了。陀螺仪的校正还未完成,星敏感器就结束了跟踪模式,再次进入捕获模式。此时陀螺仪的漂移误差仍然有21.7度/小时之多。
又过了3分钟,星敏感器回到了跟踪模式。奇怪的事情之二发生了——卫星姿控系统这次认为星敏感器与陀螺仪的误差超过1度,所以星敏感器的数据不予采纳,以陀螺仪为准。

图3 “瞳”故障时间线。可见陀螺仪误差消除一部分后即终止,当星敏感器再次恢复正常工作时,却被踢出了控制回路。(图自JAXA事故报告)
反作用轮
于是,陀螺仪21.7度/小时的漂移误差被当成了真正的卫星自旋速度。 “瞳”觉得该做点什么了——她启动了反作用轮来消除这不存在的“自旋”。这反倒使卫星真的自旋起来。
在反作用轮工作的同时,要通过磁力矩器来进行动量卸载。但由于卫星在错误的姿态下,磁力矩器没有起到卸载作用,角动量逐渐累积,反作用轮越转越快。根据JAXA事后对遥测数据的分析,到10:00左右,反作用轮转速接近设计上限(120 Nms)。
推力器
在与不存在的敌人战斗了几个小时后,反作用轮已经精疲力竭。在接近10点钟的时候,“瞳”的太阳帆板偏离太阳的角度仍然很大,这是会直接危及卫星存亡的问题。“瞳”可能认为是时候开启天王山之战了,于是她做出了最后一个决定:启用推力器控制模式(Thruster Safe Hold Mode: RCS(Reaction Control System) SH(Safe Hold))。这是卫星的最小安全模式,即系统认为此时必须靠推力器来保持对日指向,以保证太阳帆板获取足够的电力。
最后一件奇怪的事情来了。在JAXA的报告中说,2月28日,JAXA曾向“瞳”上注了新的RCS控制参数,是因为入轨后展开了一个扩展光学平台(Extensible Optical Bench),这改变了卫星的质心位置,所以需要一套新的参数——这套新参数,竟是,错误的。
推力器的澎湃动力搭配错误的参数,“瞳”转的越来越快,据推测在10:42分前后,离心力扯掉了太阳帆板、EOB……“瞳”再无回天之望。
3. “瞳”之踵
“瞳”这样一个投入大量资源、承载无尽希望的项目,为何会如此轻易的陨落?上文的分析中可以看到自然和认为的因素掺杂其中,它们无意中击碎了“瞳”的阿喀琉斯之踵。
风起于青蘋之末,一切开始于04:11星敏感器异常的结束了跟踪模式,而此时陀螺仪的校正尚未完成。实际上,星敏感器对于空间辐射环境非常敏感,之前“瞳”每次经过南大西洋异常区时,星敏感器都会发生一些小故障。这个区域是地球辐射带深入近地空间的部分,大量高能的电子和质子的轰击会在星敏感器的CCD上产生一些杂乱的信号,干扰它观测恒星的位置。经过几十年的太空探索,这件事情并不稀奇,任何一颗卫星在设计上都有应对之策,并不会由其导致致命的错误。
然而,当04:11“瞳”处于南大西洋异常区的边缘附近时,也许是一些不起眼的带电粒子触发了星敏感器的小小故障——却由于“瞳”的“精巧设计”,反而导致了一场雪崩。如果此时不是刚好进行过机动,如果此时不是刚结束星食,如果此时远离着辐射带……也许这一切就不会发生。

图4 “瞳”的星敏感器故障发生时的位置(上图,日本时间2015年3月26日04:11,截图来自www.satview.org),及辐射带南大西洋异常区的位置(下图,由搭载在中巴资源卫星上的北大高能粒子探测器的探测数据给出的图像)。
关于卫星姿控的程序问题,陈鸿飞教授说:“问题发生在陀螺仪校正没有完成,而星敏感器出现错误。姿控就以错误的陀螺仪数据作为依据了。校准陀螺仪的算法应该是卡尔曼滤波,初始化滤波带来了错误的数据。”
“而软件的另一个错误是,在校准过程中,即使星敏感器故障也不应该依据未校正状态的陀螺仪进行调姿。应该等一段时间,让星敏感器正确捕获姿态。甚至可以等待地面可以测控以后再动作。”
王珏高工表示:“从软件设计上来说,“瞳”的姿控软件算法有很大的问题。第一,卫星进行机动时,陀螺仪的漂移会异常增大,需要星敏感器进行校准,因此,使用陀螺仪测量姿态需要有一个前提:经校准后没有进行姿态机动。第二,星敏感器作为陀螺仪的校准源,当两者发生差异时,应该使用第三方数据,或者至少也不应该使用陀螺仪数据。”
“事故涉及到的技术都是成熟技术。综合起来两个问题比较关键,第一是姿态机动和星敏故障两个事件的耦合没有考虑到;第二是上注控制参数没有经过验证确认。
4. 期待重生
需要说明的是,上述故障过程的很大一部分还是推测的,因为从3:13到5:49之间“瞳”没有下传遥测数据,原因未知。在5:49之后遥测数据恢复后,陀螺仪21.7度/小时的漂移误差才被知晓。对于此前的过程,JAXA事故报告中也多用“estimated”等字眼。真相只有一个,但也许还要等待。
人将自己的思维灌注到程序中,希望它的决策是果断而理性的。然而,在AlphaGo已能纵横纹枰的今天,人类却仍不能放心的把310亿日元的“瞳”交给程序。
多年以后,当新一代望远镜再次瞄准目标,人们将会回想起“瞳”的传说。那是一双可以洞穿宇宙的眼睛,人类曾拥有过三天,而原本期望的是十年。
参考资料
http://global.jaxa.jp/projects/sat/astro_h/files/topics_20160415.pdf
http://www.nature.com/news/software-error-doomed-japanese-hitomi-spacecraft-1.19835
Ninomiya, K., Muranaka, N. and Uo, M., 1986. In-flight calibration method of instrument misalignment of an astronomy satellite. Automatic Control in Space 1985, 1, pp.223-230.
欢迎转载,请注明“本文来自北京大学空间物理与应用技术研究所网站 http://www.space.pku.edu.cn”
